'Passive' Radiolocation
One of my favorite projects in my undergraduate education was for a class on electromagnetic fields and energy. The class's project requirement was open ended and my two partners and I settled on a radiolocation project loosely inspired by Richard Godfrey's method of searching for Malaysia Airlines Flight 370.
The fundamental goal of our project was to design and fabricate a system that could locate a conductive object on a plane based off of the reflected and obstructed transmissions from sets of paired antennas. This approach is distinct from radar because of its consideration of signals obstructed between (relatively) distant points and lack of consideration of the timing of reflected signals.
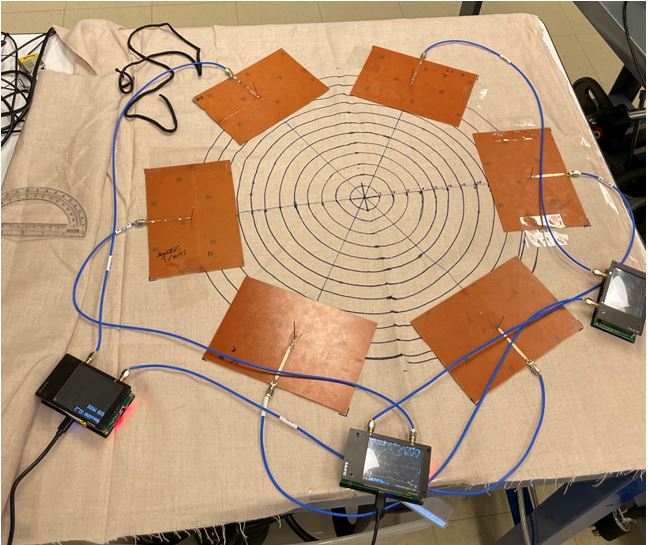
Our demonstration setup, shown below, consisted of three nanoVNAs, each measuring ratios of reflected and transmitted power between a pair of quarter wave dipole antennas operating in the 2-3Ghz range. The test object was an aluminum can placed at various points on the plane.
We gathered datapoints for the reflected and received transmit power ratios for each pair of antennas with the can at a variety of points in the plane, and I wrote a simple processing algorithm to predict the three most likely locations of the can based off of reflected and received transmit power ratios from the nanoVNAs. The system was typically able to locate the can with an accuracy of approximately 5 cm in one of the top three predictions.
The accuracy of the system was limited by a few factors. First, the antennas were fabricated by hand were less precisely tuned to each other than a machined antenna could have been. Similarly, the 50 Ohm copper microstrips were trimmed by hand and likely introduced a small impedance mismatch despite our best efforts to trim them to size. Second, the system was highly sensitive to environmental factors. The test data gathered for the prediction algorithm was sensitive to the geometry of the lab environment and highly influenced by ambient movement of individuals in the lab. Third, the prediction algorithm was simplistic in nature and did not incorporate phase data or weight the importance of known datapoints in making a prediction. Despite the system's limitations, the concept was proven and offered significant inspiration for future improvements or applications.
If you're interested in the more technical details, the project report can be downloaded below.
I also have a short powerpoint presentation that I made later to explain the project to a small group.